

































步进电机
电子膨胀阀主流的技术路线有两种:脉宽式(PWM)和步进电机式(SM)电子膨胀阀,今天我们主要跟大家介绍的是步进电机式电子膨胀阀的基础知识。

什么是步进电机?简单来讲就是把脉冲信号转化为角位移的装置。步进电机由两部分组成,如下图左,外部的绕组叫做定子,内部的永磁体叫做转子,在圆柱体上间隔分布N极和S极,对外部的定子按L1→L2→L3→L4顺序通电(励磁),定子产生磁场,跟转子产生异性相吸、同性相斥作用,转子就会旋转。再把它延伸到下图右,就接近电子膨胀阀的原型了:外面是线圈即定子,内部是永磁体转子,转子旋转通过“传动机构”最终转化为阀杆(针)的线位移(上下)。
上图中的通电方式按L1→L2→L3→L4顺序通电,且同一时间只有一个绕组(相)处于通电状态,这样的励磁方式叫1-1相励磁,也是最简单的步进电机的励磁方式,但是实际上在电子膨胀阀的应用上,我们通常采用更加复杂的1-2相或者2-2相励磁。
1-2相励磁和2-2相励磁
什么是1-2相励磁和2-2相励磁?如下图左,中间的M代表转子永磁体,周围的线圈代表定子,线圈分为了上下两部分,每一部分都有两个绕组,一共4个绕组,每一个绕组我们叫1“相”,A,A/,B,B/,分别和COM公共端构成4个绕组,即4“相”,公共端COM在对电子膨胀阀驱动时永远接电源正极,与每相(负极)通电。如我们按照下图右,每次通电2个绕组,需要通电4次完成一个控制循环,就叫4“拍”,这种驱动方式我们就叫4相4拍”,由于每次都通电2个绕组,励磁方式就叫2相励磁,也叫2-2相励磁。
一个循环4个拍即4个脉冲,也是我们经常听到的电子膨胀阀走了“4步”。
当然我们还可以通过另外一种方式来控制,如下面这张图,先对一个绕组通电,再对2个绕组通电,按此规律,需要通电8次完成一个控制循环,就叫8拍,这种驱动方式我们就叫4相8拍,每次按1-2-1-2的相数量来通电,这种励磁方式就叫1-2相励磁。
如果说2-2相里的每一脉冲算是“一步”的话,1-2相里的每一脉冲只能算是“半步”,但是由于习惯表达原因,我们将“半步”通常也说成是“一步”。如大家广为人知的三花的DPF(T)系列电子膨胀阀是全开500步,实际上是500个半步。
如果转子旋转一周走的行程是一样的话,显然1-2相的方式走过的步数更多,步幅更小,控制更精确。
说到这里,也许你会将1-2/2-2相励磁与单/双极驱动相混淆,非常有必要说明一下什么是单极驱动和双极驱动。
单极驱动和双极驱动
其实我们刚刚介绍的有COM公共端的驱动方式为单极驱动(无论是1-2还是2-2相),作为单极驱动的定子,COM端永远是接电源的正极,4个绕组永远接负极,步进电机不论正转还是反转都不需要改变电流的方向,控制非常简单。
单极驱动的电子膨胀阀的线圈的典型特征为引线是5根线或者6根线,6根线为两个COM端,5线则是将2个COM端合并为为1个而已,本质上没有区别。
而双极驱动没有COM端,为2个绕组(A和A/构成绕组1,B和B/构成绕组2),要想实现正转和反转需要通过改变绕组的电流方向(比如正转时为A→A/,反转时A/→A),控制相对复杂,线圈的典型特征为4根线。
单极驱动、双极驱动
那么什么时候用单极驱动,什么时候用双极驱动?从通电方式来说,对于单极驱动的电机,不论是1-2相励磁还是2-2相励磁,同一时间最多只有一半的绕组在通电,而双极驱动总是2-2相励磁,总是所有绕组通电,所以双极驱动的电机效率更高,驱动力更强,适合于驱动大容量的电子膨胀阀。而单极驱动一般适用于小容量的电子膨胀阀,因为单极驱动使用1-2相励磁(4相8拍)相比双极驱动使用2-2相励磁(2相4拍),完成一个控制循环的脉冲数是翻倍的。
小容量的电子膨胀阀一般为直动式,阀针的开度不是很大,如果从单极驱动改为双极驱动,全开的阀针位移脉冲数会少一半,意味着每动作一个脉冲的阀针位移变大,阀的调节精度会下降。
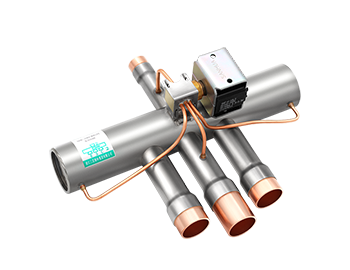
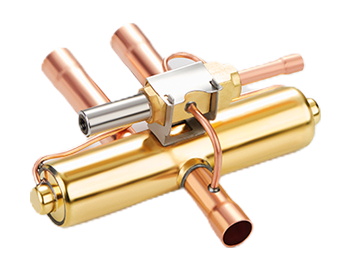
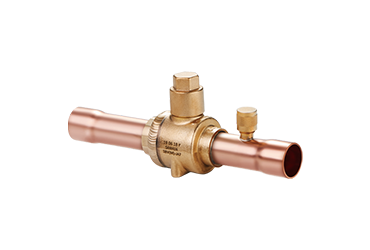
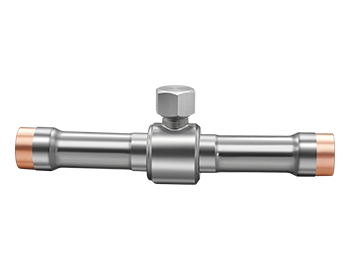
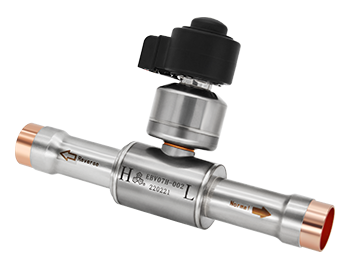
那么有人会问,单极驱动只能采用1-2相励磁(4相8拍)吗?当然不是。单极驱动也可以采用2-2相励磁(4相4拍),可以通过增加多级齿轮箱的设计增加全开的脉冲数,保证阀的调节精度。这和大容量的电子膨胀阀(使用双极驱动,2相4拍),通过齿轮箱减速设计增加全开的脉冲数来保证阀的调节精度是一样的。常见的不同驱动类型的电子膨胀阀外观如下图:
直动式电子膨胀阀单极1-2相,500步
减速式DPF(O)或(U)单极2-2相,2000步
减速式电子膨胀阀VPF双极2-2相, 3800步
单极驱动和双极驱动的对比如下图:







